2022. 11. 16. 15:46ㆍLabview(랩뷰)
안녕하세요
제가 오늘로 메카트로닉스학과에서 하는 가상 계측 응용 과목을 들은지도 3번째가 되었는데,
오늘 배운 내용을 직접 글로 올리려고 합니다!
1. Switch(컨트롤 생성)를 통한 SSR on/off 제어
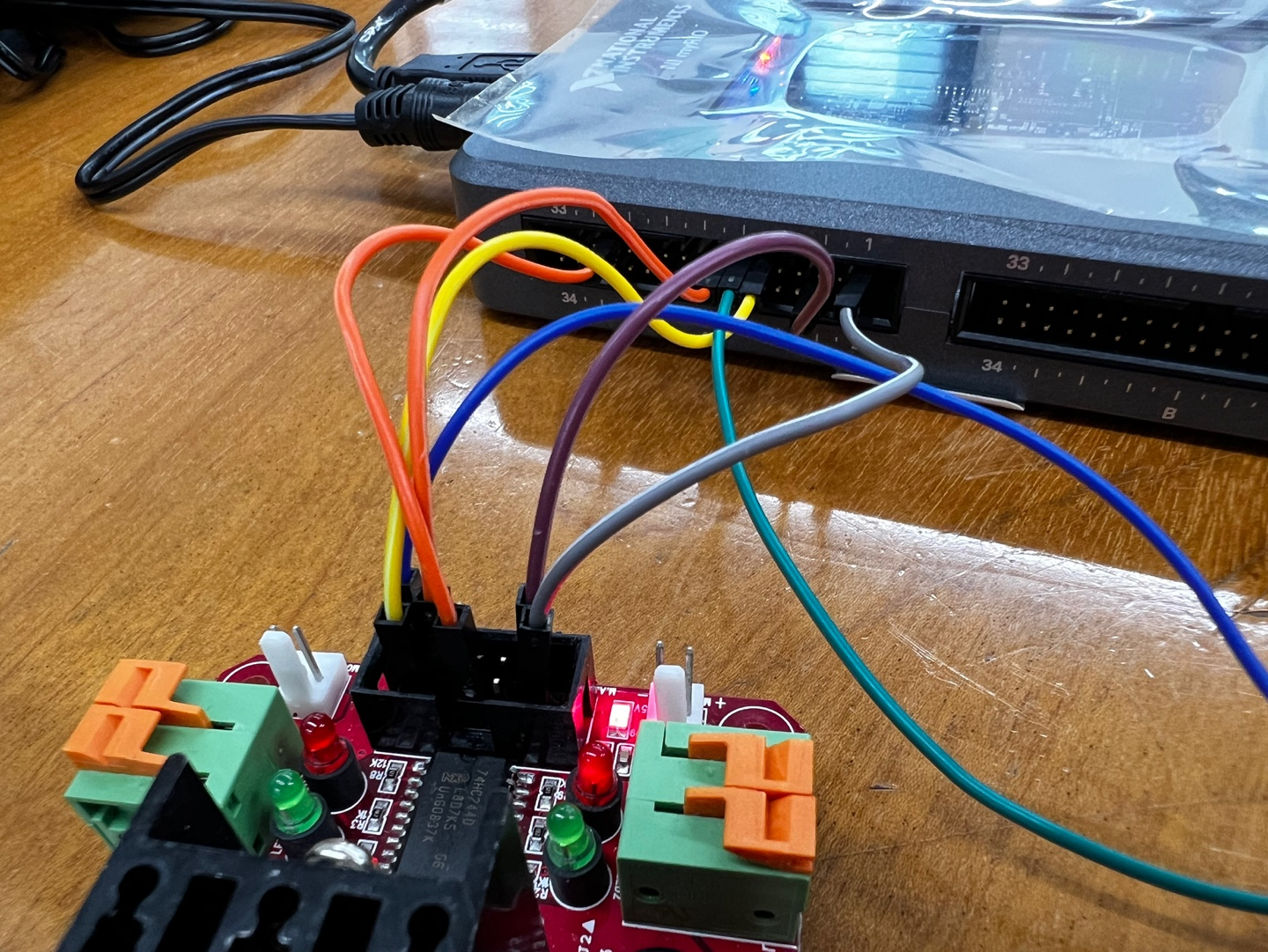
(1) PIN 연결
- Digital output 블록과 Switch 컨트롤 블록 연결 후 스위치 on/off로 동작
- PIN 번호 연결은 11번은 SSR의 +극, 12번은 SSR의 -극(GROUND)에 연결

(2) 실제 구동 모습
https://www.youtube.com/watch?v=VPkVWvFNULs
2. PWM 모터 회전 제어
- 모터의 회전 제어는 L298N의 ENA(모터A 제어), ENB(모터B 제어) 단자에 PWM 신호를 주어 이루어진다. 여기에서는 DC모터를 1개 사용하여 ENA 단자를 통하여 속도를 제어해 보겠다. 모터 2개를 제어할 경우에도 마찬가지 방법으로 ENB 단자를 추가로 이용하면 된다.

(1) PIN 연결 방법
- myRio와 모터드라이버(L298, PWM 모듈(MAI-2MT-DC Ver.3.0))을 서로 연결한다



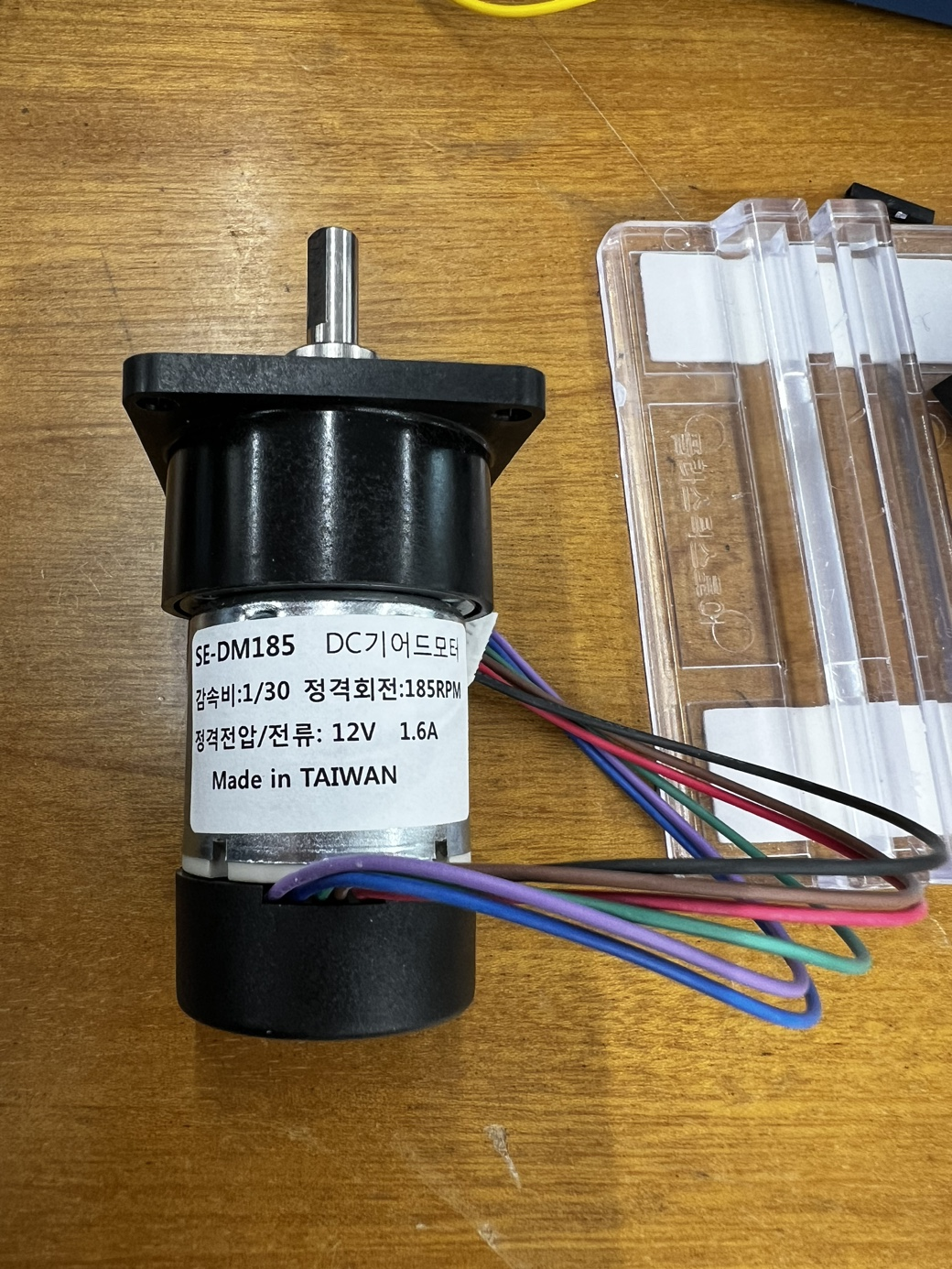
(2) DC 기어드모터(자기식 엔코더) 연결
1. black(-motor)
2. red(+motor)
3. brown(

(3) 220V 외부 전원과 연결


- Duty Cycle(올리면 속도 증가), Frequency(올리면 돌림힘이 증가, 올리면 모터는 안정적으로 도나 힘이 약해진다) 제어를 통한 회전 속도 제어
- Frequency는 1000 이상으로 올리면 소음이 발생됨, 그래서 적정 Frequency는 1000 정도
- Frequency가 크면 클수록 DutyCycle(회전수)이 좀더 빨리 멈추고, Frequency가 작으면 DutyCycle(회전수)이 좀더 늦게 멈춘다.
- 쉽게 생각하면 Frequency가 무게라고 생각하면 됨! 무게가 높을 수록 회전 수를 많이 돌리기 힘들다.
(4) 실제 구동 모습
https://www.youtube.com/watch?v=VguoZbgWCHg
3. RC카 제어


(1) 실제 구동 모습
https://www.youtube.com/watch?v=qPAE-_7C83U
로봇 자동차를 트랙 위에서 회전시키려면?
-> 우회전하려면 왼쪽 모터의 DutyCycle을 높이고, 오른쪽 모터의 DutyCycle을 낮춘다.
-> 좌회전하려면 왼쪽 모터의 DutyCycle을 낮추고, 오른쪽 모터의 DutyCycle을 높인다.
다음 차시에는 RC카 양쪽 다 돌아가는 동작과 속도, 회전 제어 등을 공부할 예정입니다.
다음 Labview 수업 시간에 만나요 여러분~

'Labview(랩뷰)' 카테고리의 다른 글
| D+31, Labview 수업 6차시 자율 주행 자동차 구현 (0) | 2022.12.07 |
|---|---|
| D+23, Labview 수업 4, 5차시 자율 주행 자동차 구현 (1) | 2022.11.30 |